Attention: this is a legacy library and thus not supported by Toradex anymore. We recommend that you use the new libraries for all Toradex modules. Please see the Toradex CE Libraries and Code Samples for up-to-date information.
CAN (controller area network) is a multi-master broadcast serial bus standard communication. CAN is a message-based protocol, designed specifically for automotive to allow communication between devices within a vehicle without a host computer.
Use Cases:
Take two Colibri Evaluation Board V3.1 or newer or Apalis Evaluation Board 1.0 or newer and connect using CAN bus at CAN connector (X2 on Colibri EVB, X32 on Apalis EVB).
You can use the external MCP2515 controller, as described for Colibri Tegra and PXA above, or use the internal CAN controller. In this case you'll need to connect the pins of the CAN controller you plan to use (all the modules have 2 controllers) to the CAN connector. To do that you need to remove the jumpers from the jumpered connectors (X8 or X11, depending on the pins you need to use, please check the module datasheet for detailed information) and connect the module output pins (X9 or X10 connector) to the CAN transceiver via connector X38. Remember to also remove jumpers JP4 and JP5 to disconnect the external controller from CAN bus.
CAN interface is part of the standard Apalis pinout. It is implemented via an external controller (Tegra) or directly by the SOC (iMX6). The Apalis Evaluation board provides 2 can connectors (X32A and X32B) that can be used without any additional hardware configuration.
After executing the .exe file you will see the following window.
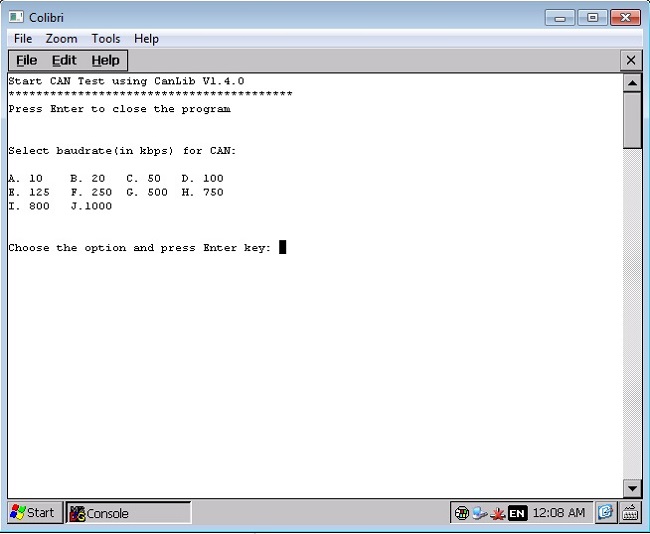
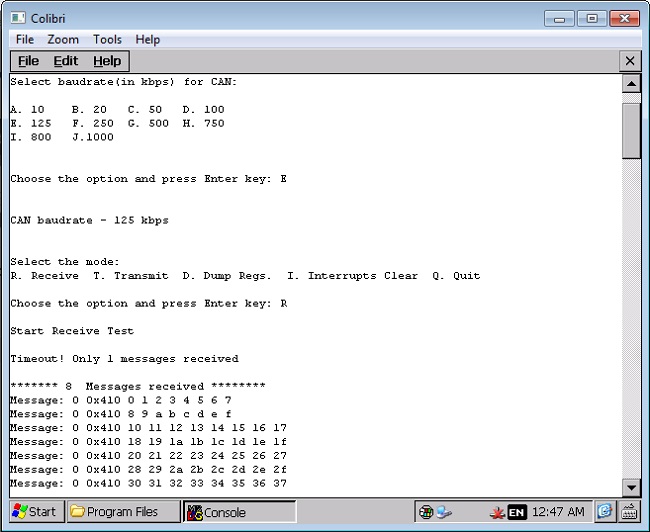
After selecting Baudrate Press 'R' for Receive.
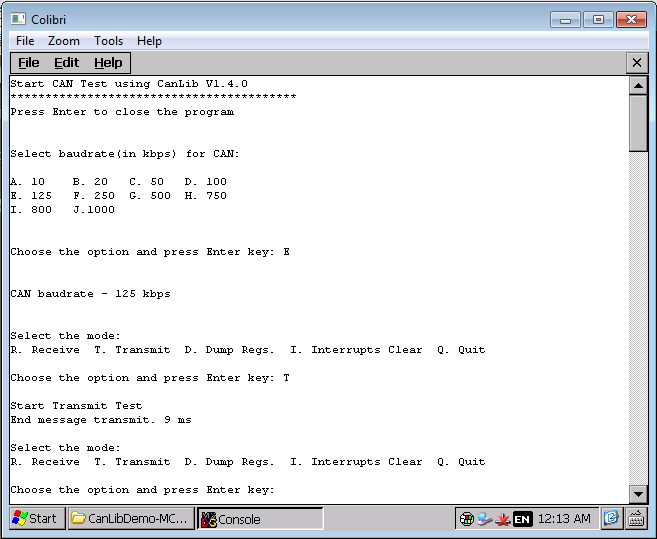
Enter "T" will transmit Demo message.
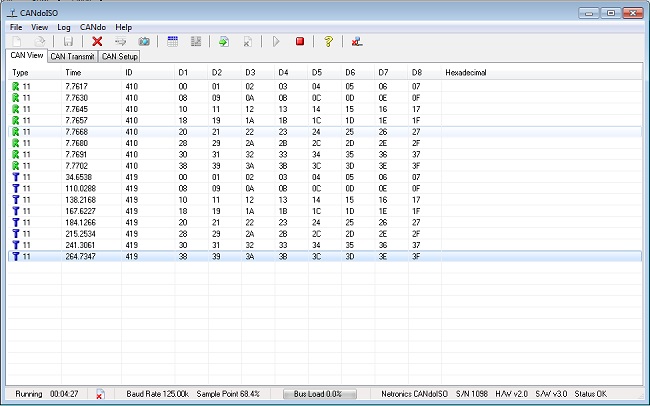
Output of CAN analyser showing Received and Transmit message.For more information on CANdo analyser click here
You can find our new libraries here and the downloadable package contains both the CAN libraries and a sample application to start testing CAN connectivity.
