On our Toradex modules, the U-Boot boot loader and the Linux kernel use UART_A as serial debug console. The serial console is the primary and most reliable interface to the boot loader and Linux kernel. This article has two main sections:
How to use (attach to and communicate via) the debug UART, a.k.a serial console.
How to disable the debug UART.
If you are looking for instructions on how to communicate with other devices using the UART, please refer to the article UART (Linux).
Warning: We do not recommend to use UART_A for any other purpose. Disabling it prevents analyzing errors (e.g. crash of the user interface) or analyzing if the system is in a non-bootable state.
Tip: This article shows how to disable the debug messages on the serial console only. In case you would like to disable debug messages or the virtual console on graphical output (DVI-I, HDMI, LVDS, or VGA) please refer to the Framebuffer (Linux) article.
You can easily access your Toradex SoM via the serial, in this section, you will find out how to set up the hardware on each of our boards as well as know the parameters. This section applies to both our BSP Layers and Reference Images for Yocto Project and TorizonCore.
To avoid being requested to use sudo all the time, you can add your user to the dialout group. You can find your user name with the whoami command. To do it in a single-line, in your development PC, run:
$ sudo usermod -a -G dialout $(whoami)
To apply the changes, either reboot or log off, and log in.
Note: Notice that the USB C connector (X66) has an integrated USB-serial converter that provides access to the computer on module's debug serial port.
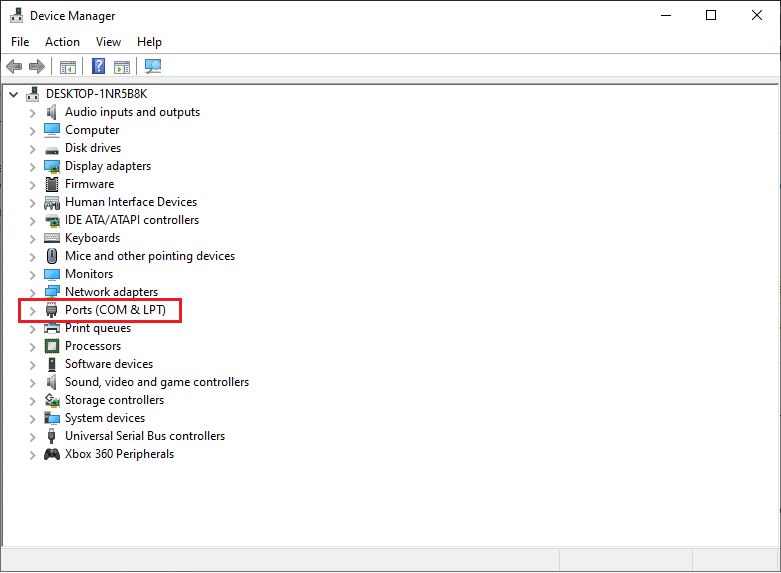
Verdin has an integrated Serial-to-USB converter that lists 4 serial ports on your computer. The highest index is the Linux serial console. Example, if you see /dev/ttyUSB0, /dev/ttyUSB1, /dev/ttyUSB2 and /dev/ttyUSB3 listed, then /dev/ttyUSB3 is the serial console. The same logic applies to Windows COM ports.
Attention: If you connect to the first or the second port (for example /dev/ttyUSB0 or /dev/ttyUSB1), you will not be able to use the board. This happens because those ports are dedicated to power/reset control and FTDI JTAG. Just close those connections and reset the board.
Connect a USB C to USB Type-A cable to DEBUG.
Serial setup for Dahlia Carrier Board
Note: Notice that the USB C connector (DEBUG) has an integrated USB-serial converter that provides access to the computer on module's debug serial port.
Verdin has an integrated Serial-to-USB converter that lists 4 serial ports on your computer. The highest index is the Linux serial console. Example, if you see /dev/ttyUSB0, /dev/ttyUSB1, /dev/ttyUSB2 and /dev/ttyUSB3 listed, then /dev/ttyUSB3 is the serial console. The same logic applies to Windows COM ports.
Attention: If you connect to the first or the second port (for example /dev/ttyUSB0 or /dev/ttyUSB1), you will not be able to use the board. This happens because those ports are dedicated to power/reset control and FTDI JTAG. Just close those connections and reset the board.
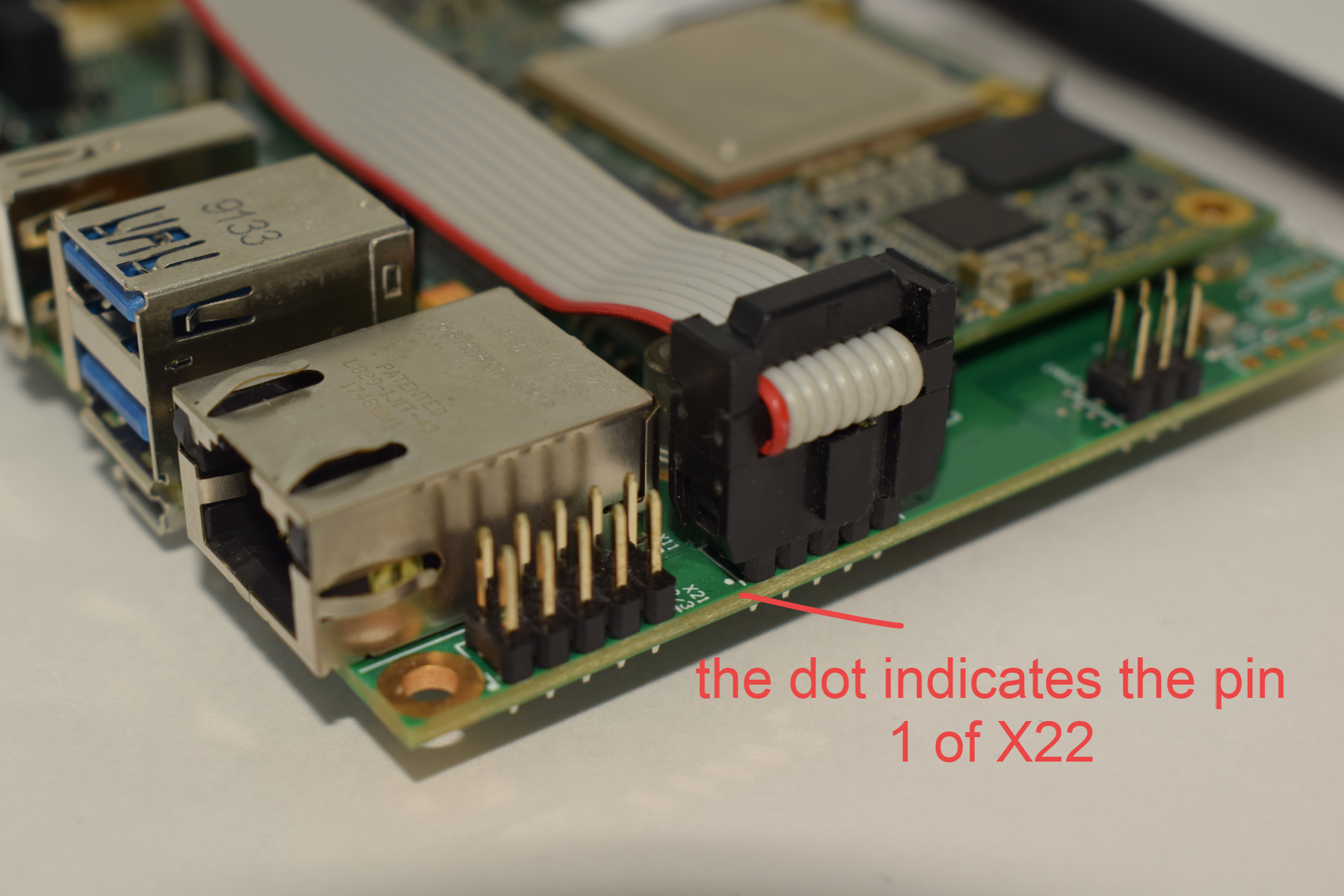
Connect the DB9 to the IDC adapter cable to the X22 connector on the Ixora:
IDC header connected to the Ixora Carrier Board
Note: The adapter is included in the Toradex Cable Kit, the standard we used is normally called DTK or Intel standard.
Connect your host machine to the adapter cable using a serial cable or Serial to USB converter:
Serial setup for Ixora Carrier Board
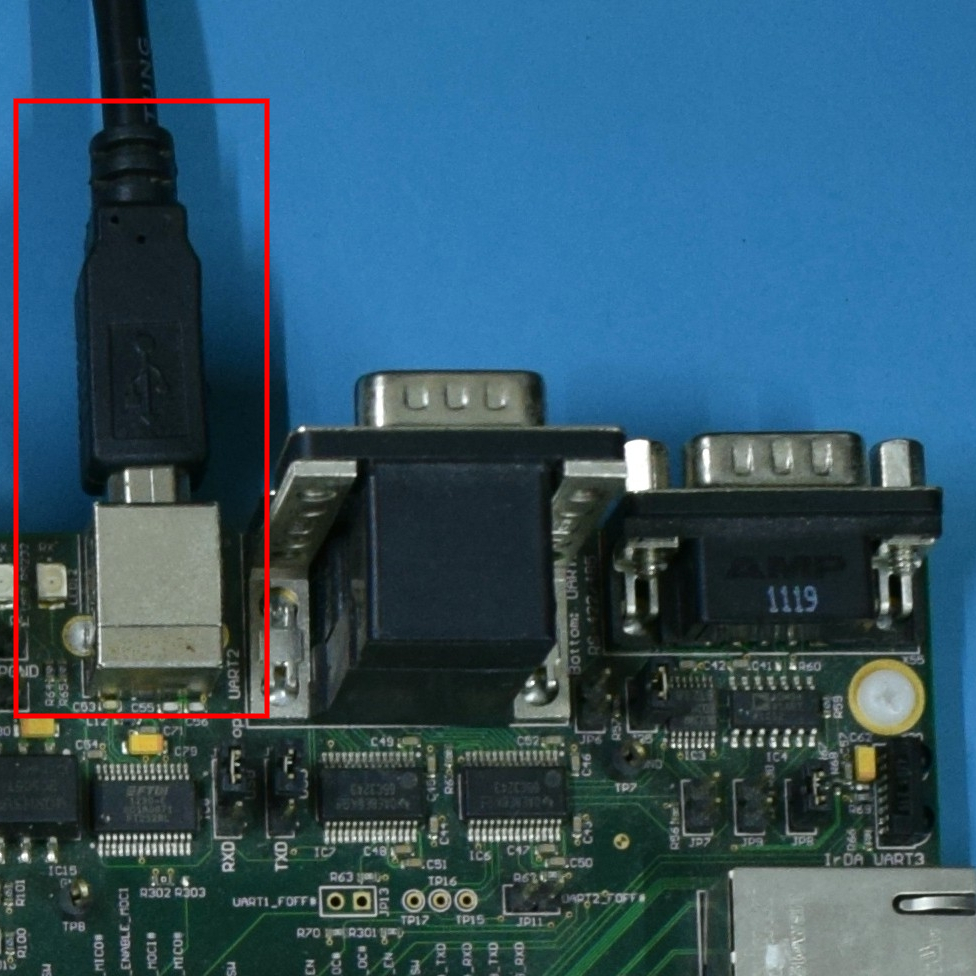
Use UART-1 via the USB Type-B connector X29:
Using UART via USB X27
Make sure that the jumpers JP10 and JP12 are set to USB mode as shown in the image below:
Jumpers JP10 and JP12 - USB mode
Connect the DB9 to the IDC adapter cable to the X13 connector on the Iris:
IDC header connected to the Iris Carrier Board
Note: The adapter is included in the Toradex Cable Kit, the standard we used is normally called DTK or Intel standard.
Connect your host machine to the adapter cable using a serial cable or Serial to USB converter:
Serial setup for the Iris Carrier Board
Connect a USB micro-B to USB Type-A cable to X4.
Serial setup for Aster Carrier Board
Note: Notice that the micro USB connector (X4) can be employed as a means to power the system and also has an integrated USB-serial converter that provides access to the computer on the module's debug serial port.
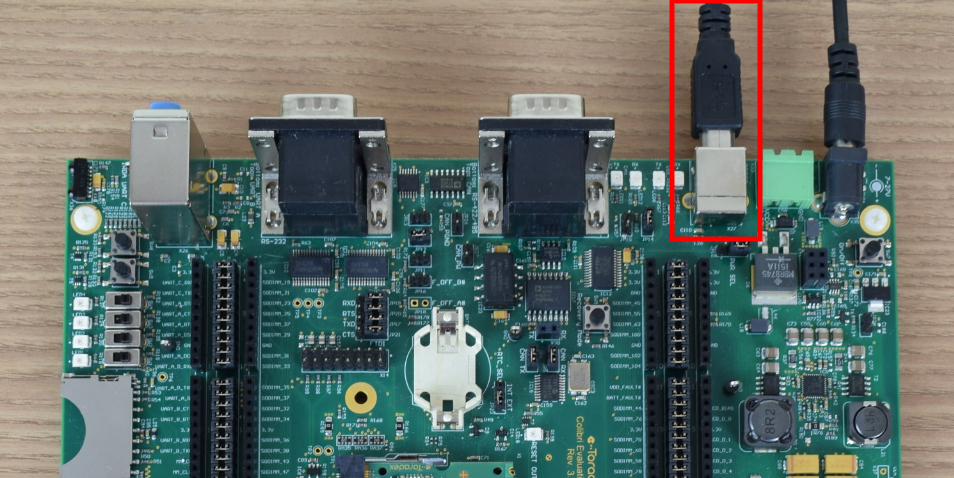
Use UART A via the USB Type-B connector X27:
Using UART via USB X27
Make sure that the jumpers JP19 and JP17 are set to USB mode as shown in the image below:
We don't provide instructions on how to do this. We advise you to use either the default Debug Port defined by Toradex or NXP.
For the i.MX 8/8X SoMs which have a System Controller Unit/System Controller Firmware (SCU/SCFW), or other SoMs from the i.MX 8 family (such as the i.MX 8M Mini) which use a BootROM, it may be nearly or even impossible to change the default UART.
Here are sections for disabling the console on U-Boot and the Linux kernel. Make sure to check on UART (Linux) the name of the UART interfaces available for your specific SoM before proceeding.
To disable the serial console modifying U-Boot, you need to reconfigure it following some basic steps. Before proceding, you have to install
a GNU toolchain:
Make sure you understand the basic concepts of our Embedded Linux offerings, such as release cycles, distributions and images. Start with the following article:
Beginning with BSP 5, as part of our OpenEmbedded Dunfell update we transitioned to using version 9.3 of the gcc compiler. Arm releases well tested binary toolchains which can be used to cross-compile software for our modules. At the time of this writing, Arm has not released gcc 9.3 compilers as of yet. Therefore, just use the version 9.2 ones for now:
For 32 bit Arm: gcc-arm-9.2-2019.12-x86_64-arm-none-linux-gnueabihf.tar.xz
For 64 bit Arm: gcc-arm-9.2-2019.12-x86_64-aarch64-none-linux-gnu.tar.xz
You have to choose to download either the 32 bit or 64 bit Arm cross-toolchain, according to the architecture of your Computer on Module SoC. Select the correct one from the tabs below:
To install the toolchain on your host machine, download and unpack the tar.xz file. From the command-line:
$ cd ~
$ wget -O gcc-arm-9.2-2019.12-x86_64-arm-none-linux-gnueabihf.tar.xz "https://developer.arm.com/-/media/Files/downloads/gnu-a/9.2-2019.12/binrel/gcc-arm-9.2-2019.12-x86_64-arm-none-linux-gnueabihf.tar.xz?revision=fed31ee5-2ed7-40c8-9e0e-474299a3c4ac&la=en&hash=76DAF56606E7CB66CC5B5B33D8FB90D9F24C9D20"
$ tar xvf gcc-arm-9.2-2019.12-x86_64-arm-none-linux-gnueabihf.tar.xz
$ ln -s gcc-arm-9.2-2019.12-x86_64-arm-none-linux-gnueabihf gcc-linaro
The U-Boot and Linux makefiles use the environment variables ARCH/CROSS_COMPILE to configure and call the compiler correctly. Therefore, these environment variables must be exported in any shell instance that will run configure/compile commands to build U-Boot or Linux for the target module.
To install the toolchain on your host machine, download and unpack the tar.xz file. From the command-line:
$ cd ~
$ wget -O gcc-arm-9.2-2019.12-x86_64-aarch64-none-linux-gnu.tar.xz "https://developer.arm.com/-/media/Files/downloads/gnu-a/9.2-2019.12/binrel/gcc-arm-9.2-2019.12-x86_64-aarch64-none-linux-gnu.tar.xz?revision=61c3be5d-5175-4db6-9030-b565aae9f766&la=en&hash=0A37024B42028A9616F56A51C2D20755C5EBBCD7"
$ tar xvf gcc-arm-9.2-2019.12-x86_64-aarch64-none-linux-gnu.tar.xz
$ ln -s gcc-arm-9.2-2019.12-x86_64-aarch64-none-linux-gnu gcc-linaro
The U-Boot and Linux makefiles use the environment variables ARCH/CROSS_COMPILE to configure and call the compiler correctly. Therefore, these environment variables must be exported in any shell instance that will run configure/compile commands to build U-Boot or Linux for the target module.
Beginning with BSP 4, as part of our OpenEmbedded Zeus update we transitioned to using version 8.3 of the gcc compiler. Arm releases well tested binary toolchains which can be used to cross-compile software for our modules:
For 32 bit Arm: gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf.tar.xz
For 64 bit Arm: gcc-arm-8.3-2019.03-x86_64-aarch64-linux-gnu.tar.xz
You have to choose to download either the 32 bit or 64 bit Arm cross-toolchain, according to the architecture of your Computer on Module SoC. Select the correct one from the tabs below:
To install the toolchain on your host machine, download and unpack the tar.xz file. From the command-line:
$ cd ~
$ wget -O gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf.tar.xz "https://developer.arm.com/-/media/Files/downloads/gnu-a/8.3-2019.03/binrel/gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf.tar.xz?revision=e09a1c45-0ed3-4a8e-b06b-db3978fd8d56&la=en&hash=93ED4444B8B3A812B893373B490B90BBB28FD2E3"
$ tar xvf gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf.tar.xz
$ ln -s gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf gcc-linaro
The U-Boot and Linux makefiles use the environment variables ARCH/CROSS_COMPILE to configure and call the compiler correctly. Therefore, these environment variables must be exported in any shell instance that will run configure/compile commands to build U-Boot or Linux for the target module.
To install the toolchain on your host machine, download and unpack the tar.xz file. From the command-line:
$ cd ~
$ wget -O gcc-arm-8.3-2019.03-x86_64-aarch64-linux-gnu.tar.xz "https://developer.arm.com/-/media/Files/downloads/gnu-a/8.3-2019.03/binrel/gcc-arm-8.3-2019.03-x86_64-aarch64-linux-gnu.tar.xz?revision=2e88a73f-d233-4f96-b1f4-d8b36e9bb0b9&la=en&hash=167687FADA00B73D20EED2A67D0939A197504ACD"
$ tar xvf gcc-arm-8.3-2019.03-x86_64-aarch64-linux-gnu.tar.xz
$ ln -s gcc-arm-8.3-2019.03-x86_64-aarch64-linux-gnu gcc-linaro
The U-Boot and Linux makefiles use the environment variables ARCH/CROSS_COMPILE to configure and call the compiler correctly. Therefore, these environment variables must be exported in any shell instance that will run configure/compile commands to build U-Boot or Linux for the target module.
Beginning with image 3.0, as part of our OpenEmbedded Thud update we transitioned to using version 8.2 of the gcc compiler. Arm releases well tested binary toolchains which can be used to cross-compile software for our modules:
For 32 bit Arm: gcc-arm-8.2-2019.01-x86_64-arm-linux-gnueabihf.tar.xz
For 64 bit Arm: gcc-arm-8.2-2019.01-x86_64-aarch64-linux-gnu.tar.xz
You have to choose to download either the 32 bit or 64 bit Arm cross-toolchain, according to the architecture of your Computer on Module SoC. Select the correct one from the tabs below:
To install the toolchain on your host machine, download and unpack the tar.xz file. From the command-line:
$ cd ~
$ wget -O gcc-arm-8.2-2019.01-x86_64-arm-linux-gnueabihf.tar.xz "https://developer.arm.com/-/media/Files/downloads/gnu-a/8.2-2019.01/gcc-arm-8.2-2019.01-x86_64-arm-linux-gnueabihf.tar.xz?revision=c69ea519-a965-4359-84a4-cbd440ff4130&la=en&hash=09C47C70EEE96D17EA036A7A59AE961972320A31"
$ tar xvf gcc-arm-8.2-2019.01-x86_64-arm-linux-gnueabihf.tar.xz
$ ln -s gcc-arm-8.2-2019.01-x86_64-arm-linux-gnueabihf gcc-linaro
The U-Boot and Linux makefiles use the environment variables ARCH/CROSS_COMPILE to configure and call the compiler correctly. Therefore, these environment variables must be exported in any shell instance that will run configure/compile commands to build U-Boot or Linux for the target module.
To install the toolchain on your host machine, download and unpack the tar.xz file. From the command-line:
$ cd ~
$ wget -O gcc-arm-8.2-2019.01-x86_64-aarch64-linux-gnu.tar.xz "https://developer.arm.com/-/media/Files/downloads/gnu-a/8.2-2019.01/gcc-arm-8.2-2019.01-x86_64-aarch64-linux-gnu.tar.xz?revision=21270570-4ec0-4bad-a9e1-09707614066a&la=en&hash=AFEDF645AF5B94336DB4E1E608806CEC87A02B8A"
$ tar xvf gcc-arm-8.2-2019.01-x86_64-aarch64-linux-gnu.tar.xz
$ ln -s gcc-arm-8.2-2019.01-x86_64-aarch64-linux-gnu gcc-linaro
The U-Boot and Linux makefiles use the environment variables ARCH/CROSS_COMPILE to configure and call the compiler correctly. Therefore, these environment variables must be exported in any shell instance that will run configure/compile commands to build U-Boot or Linux for the target module.
Beginning with image 2.8, as part of our OpenEmbedded Rocko update we transitioned to using version 7.3 of the gcc compiler. Linaro releases well tested binary toolchains which can be used to cross-compile software for our modules:
For 32 bit Arm: gcc-linaro-7.3.1-2018.05-x86_64_arm-linux-gnueabihf.tar.xz
For 64 bit Arm: Embedded Linux BSP 2.8 does not support any 64 bit Arm SoMs by Toradex.
To install the toolchain on your host machine, download and unpack the tar.xz file. From the command-line:
$ cd ~
$ wget -O gcc-linaro-7.3.1-2018.05-x86_64_arm-linux-gnueabihf.tar.xz "https://releases.linaro.org/components/toolchain/binaries/7.3-2018.05/arm-linux-gnueabihf/gcc-linaro-7.3.1-2018.05-x86_64_arm-linux-gnueabihf.tar.xz"
$ tar xvf gcc-linaro-7.3.1-2018.05-x86_64_arm-linux-gnueabihf.tar.xz
$ ln -s gcc-linaro-7.3.1-2018.05-x86_64_arm-linux-gnueabihf gcc-linaro
The U-Boot and Linux makefiles use the environment variables ARCH/CROSS_COMPILE to configure and call the compiler correctly. Therefore, these environment variables must be exported in any shell instance that will run configure/compile commands to build U-Boot or Linux for the target module.
Beginning with image 2.7b2, as part of our OpenEmbedded Morty update we transitioned to using version 6.2 of the gcc compiler. Linaro releases well tested binary toolchains which can be used to cross-compile software for our modules (choose gcc-linaro-6.2.1-2016.11-x86_64_arm-linux-gnueabihf.tar.xz):
Beginning with image V2.6, as part of our OpenEmbedded Jethro update we transitioned to using version 5.2 of the gcc compiler. Linaro releases well tested binary toolchains which can be used to cross-compile software for our modules (choose gcc-linaro-5.2-2015.11-2-x86_64_arm-linux-gnueabihf.tar.xz):
Note: Since the 14.11 release Linaro only provides x86_64 toolchains. If you use 32-bit Linux on your host machine (check using uname -m), you can still download the older 14.09 release which is still 32-bit:
You have to choose to download either the 32 bit or 64 bit Arm cross-toolchain, according to the architecture of your Computer on Module SoC. Select the correct one from the tabs below:
The U-Boot and Linux makefiles use the environment variables ARCH/CROSS_COMPILE to configure and call the compiler correctly. Therefore, these environment variables must be exported in any shell instance that will run configure/compile commands to build U-Boot or Linux for the target module.
U-Boot and the device tree overlays compilation for some modules needs a device tree compiler (DTC). We recommend DTC version 1.6.0 or higher.
You can build the latest version (DTC 1.6.0 at the time of writing) from the source:
$ git clone git://git.kernel.org/pub/scm/utils/dtc/dtc.git -b v1.6.0 ~/dtc
$ cd ~/dtc
$ make
$ export PATH=$HOME/dtc/:$PATH
Note: on Fedora and on Ubuntu 22.04, there have been reported DTC build errors libfdt/libfdt.h:251:28: warning: array subscript ‘struct fdt_header[0]’ is partly outside array bounds of ‘unsigned char[4]’ [-Warray-bounds]. To disable treating errors as warnings, you can remove the flag -Werror from the CFLAGS on the Makefile. We have not evaluated the consequences of doing it, do it at your own risk!
The uImage target of the Linux kernel compilation needs a recent mkimage tool.
One can install the Fedora package uboot-tools:
$ sudo dnf install uboot-tools
Or with the corresponding Debian/Ubuntu package u-boot-tools:
$ sudo apt-get install u-boot-tools
Alternatively, mkimage tool is also built during the U-Boot compilation. You can follow the U-Boot building instructions as explained further in this article, and after that, include it in PATH.
The uImage target of the Linux kernel compilation needs a recent mkimage tool.
One can simply install the Fedora package uboot-tools:
$ sudo dnf install uboot-tools
Or with the corresponding Debian/Ubuntu package u-boot-tools:
$ sudo apt-get install u-boot-tools
Alternatively, mkimage tool is also built during the U-Boot compilation. You can follow the U-Boot building instructions as explained further in this article, and after that include it in PATH.
Accordingly to the official documentation of U-boot regarding to silencing the console, the following config options need to be defined in the respective board header file to achieve the goal:
Warning: Replace <branch> by the U-Boot Git Branch for your specific configuration. You can find the version information here.
Go to u-boot-toradex/configs and modify the defconfig file of the respective board (for example, for colibri iMX8X: u-boot-toradex/configs/colibri-imx8x_defconfig) by adding and setting the variables at the end of the file as shown below:
Compile, deploy and integrate the modifications of the U-boot. Please refer to the following article concerning the setup/compilation of the same: Build U-Boot and Linux Kernel from Source Code.
Note: Enabling silent console just bypasses the console messages to null. Depending on the module type and U-Boot version you might still be able to interrupt U-Boot by pressing the specified key which allows you to control the U-Boot at run time.
Disable the console from the kernel completely by setting the console= option on the kernel command line. This can be achieved by doing it from the U-Boot prompt or using U-Boot-envtools under Linux to modify the env variables:
# setenv tdxargs 'console=null'
# saveenv
or using U-Boot-envtools under Linux:
# fw_setenv tdxargs 'console=null'
# reboot
After this, no kernel messages/serial login are available on debug serial port anymore. To re-enable the debug serial port console one needs to reset the 'console' variable back to the respective serial TTY (e.g: ttyLP0 on Colibri VFxx).
While during boot the serial baudrate is taken from the U-Boot environment variable baudrate, the later login shell baudrate needs to be configured separately if required in respective /etc/systemd/system/getty.target.wants/serial-getty@<serial device>.service file: