Attention: the Quickstart Guide for BSP 2.8, based on the Ångström distribution, is not being updated anymore. Depending on your SoM, you have different options:
Vybrid and Tegra: the information is provided as-is and still accurate, since newer Toradex BSPs are not ported to those SoMs. Just keep in mind that the Guides are not being maintained anymore, even if we find bugs or outdated instructions.
Apalis TK1 (all variants), Colibri iMX6ULL (all variants), Colibri iMX7S 256MB and Colibri iMX7D 512MB: these computer on modules are still regularly maintained in our BSPs and, to get started, you must check the software page Toradex BSP Layers and Reference Images for Yocto Project. Since Torizon is not supported, at the moment a Quickstart Guide is not available.
All other i.MX-based SoMs: you have two options to get started with embedded Linux: the first is to follow the Quickstart Guide for Torizon, which provides the greatest out-of-the-box experience, or if you choose to use Yocto, check the software page Toradex BSP Layers and Reference Images for Yocto Project.
In this lesson, you will learn the basics of GPIO usage on Linux, being able to read or write to a GPIO pin from command-line, as well as by developing a minimal C application.
In this lesson you will:
- Understand how to translate the hardware pin names to the correspondent Linux sysfs interface numbers.
- Assemble the additional hardware - an LED and a switch.
- Use the Toradex GPIO Tool to validate the hardware setup.
- Configure and use GPIO pins through the Linux sysfs.
- Debug GPIO configuration.
- Write minimal sample applications in C.
The information provided in this guide is based in Toradex's knowledge base article GPIO (Linux), as well as other knowledge sources such as kernel documentation and the Linux man-pages project.
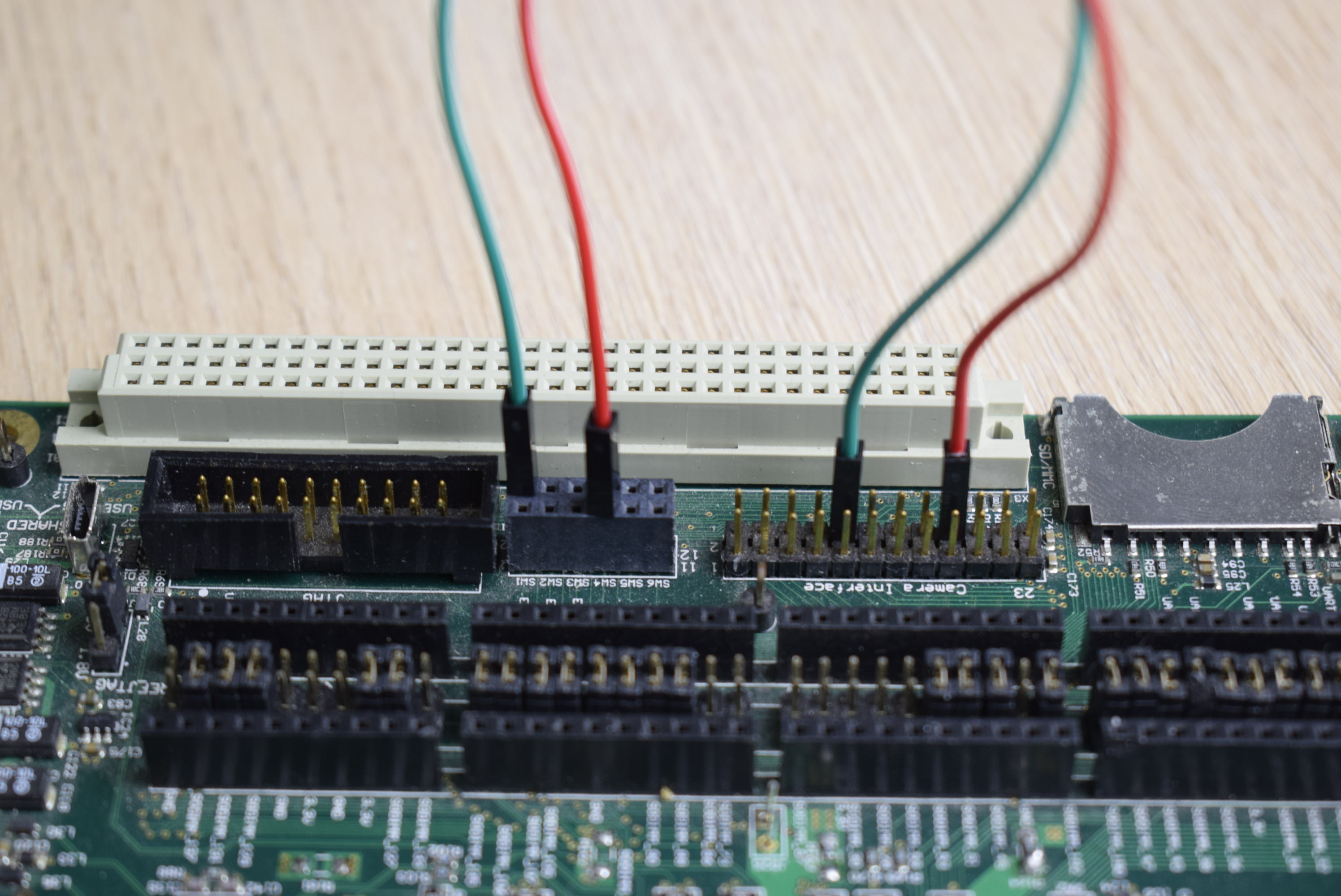
The Colibri Evaluation Board already has buttons and LEDs available for debugging purposes, therefore only jumper wires are required.
To find out which GPIO number to use in the Linux sysfs interface, you have to know the correspondence between available pins in the carrier board, number of the correspondent pins on the SODIMM connector of the Colibri computer on module and number of the pins on Linux.
Download or open in a web browser the Colibri Evaluation Board and the Colibri iMX6 datasheets from the respective products pages of the developer website:
Colibri Evaluation Board datasheet
Colibri iMX6 datasheet
For this introduction guide, some pins configured by default as GPIO in the Toradex BSP were chosen. The choice of pins was made based on their availability on all the carrier boards covered by the getting-started guide. This module will not go through the configuration of other pins as GPIO, although it is possible.
First of all, you need to find the correspondence between the SODIMM and the connectors exposed for the developer on the Colibri Evaluation Board V3.2. Consult the Colibri Evaluation Board datasheet and fill the table below based in the example provided:
Note: The notation CONNECTOR.PIN will be employed in this lesson, e.g. X12.5 means pin 5 of the X12 connector.
| Colibri Evaluation Board (connector.pin) |
SODIMM pins |
| X22.9 |
79 |
|
85 |
|
97 |
|
98 |
|
101 |
|
103 |
|
133 |
Table 1 filled
| Colibri Evaluation Board (connector.pin) |
SODIMM pins |
| X22.9 |
79 |
| X22.13 |
85 |
| X22.10 |
97 |
| X22.18 |
98 |
| X22.7 |
101 |
| X22.8 |
103 |
| X10.41 |
133 |
Warning: The pinout of the Camera Interface connector (X22) has been updated from Colibri Evaluation Board V3.1 to V3.2. Please consult the datasheet if you are using the older version.
Have a look at the table available in the "List Functions" chapter of the Colibri iMX6 datasheet. It provides a list of most of the iMX6 pins available on the SODIMM connector.
The SODIMM pins we are interested at are connected to the iMX6 SoC and have names defined by the iMX6 Ball Name function. Each pin is multiplexed to have a specific function - among them GPIO, therefore the ALT5 function is the column that we are interested at.
Having a look at the GPIO Alphanumeric to GPIO Numeric Assignment article, the correspondence between ALT5 and the Linux numeric representation of the GPIO pins is provided as a table. To find it from the ALT5 it is possible to use the formula below:
PORTx[y]
Linux numeric representation = [(x-1)*32]+y
Either by consulting the table from the article pointed above or calculating it, the previous table with the correspondence between Iris Carrier Board pins and SODIMM pins can be extended to have the iMX6 pin name (ALT5), formed by GPIO controller, as example GPI07, plus pin at SoC level, as example IO09, and the Linux numeric representation. Fill the table below based in the example provided:
| Colibri Evaluation Board (connector.pin) |
SODIMM pins |
iMX6 name (ALT5) |
Linux GPIO number |
| X22.9 |
79 |
GPIO2_IO19 |
51 |
| X22.13 |
85 |
|
|
| X22.10 |
97 |
|
|
| X22.18 |
98 |
|
|
| X22.7 |
101 |
|
|
| X22.8 |
103 |
|
|
| X10.41 |
133 |
|
|
Table 2 filled
| Colibri Evaluation Board (connector.pin) |
SODIMM pins |
iMX6 name (ALT5) |
Linux GPIO number |
| X22.9 |
79 |
GPIO2_IO19 |
51 |
| X22.13 |
85 |
GPIO6_IO06 |
166 |
| X22.10 |
97 |
GPIO2_IO18 |
50 |
| X22.18 |
98 |
GPIO1_IO15 |
15 |
| X22.7 |
101 |
GPIO2_IO21 |
53 |
| X22.8 |
103 |
GPIO2_IO20 |
52 |
| X10.41 |
133 |
GPIO2_IO03 |
35 |
Choose two of the GPIO pins from the list above to toggle an LED and read the value of a switch. This lesson will use the following pins (Linux GPIO number):
Use jumper wires to connect GPIO 15 to the slide switch SW4 on the connector X21.7, and GPIO 50 to the LED1 on the connector X21.2.
Note: For more informations about pins schematic, please access the Colibri Evaluation Board schematics here.
Note: You may use any other of the LEDs/switches available. Please refer to the section 3.9.2.3 LED / Switches (X21) of the Colibri Evaluation Board datasheet.
The Toradex Linux pre-built image comes with a tool named Toradex GPIO tool meant for debugging pins configuration. It can also be used to determine the correspondences found in the previous step. We will use it to test the hardware connections.
Note: You need a display and a mouse connected to the system in order to use the GPIO tool. Please go to the beginning of the getting-started guide for more information about assembling the peripherals.
Run the GPIO tool from the target Linux desktop:
-

Starting the GPIO tool
-

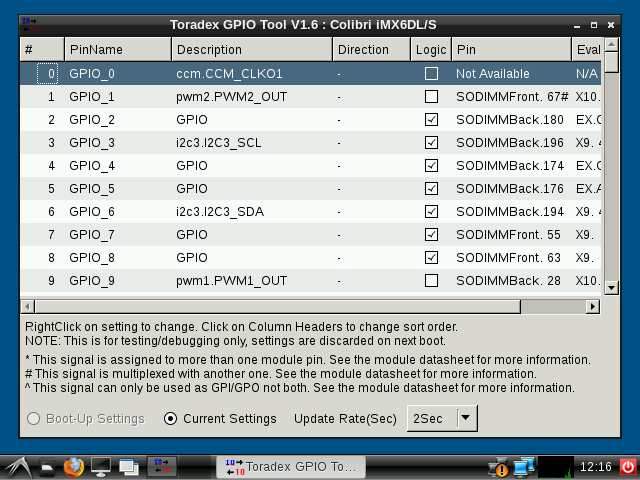
GPIO tool initial screen
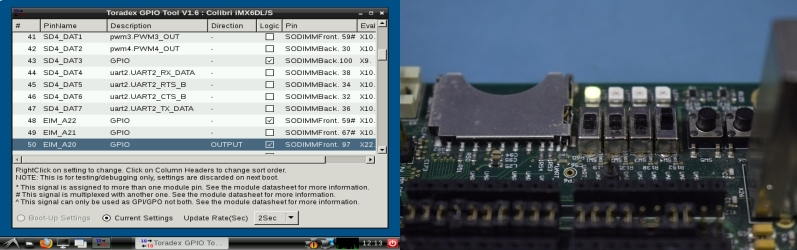
Locate the pins 15 and 50 in the table. Right click the direction of each of them and configure pin 15 as INPUT and pin 50 as OUTPUT. See the changes reflected in the application.
-

Configuring SODIMM pin
Toggle the switch SW4 and see the Logic checkbox of the pin 15 change its state. Click the Logic checkbox of pin 50 and see the LED switch on/off.
The Linux sysfs interface provides an abstraction to access the GPIO, as well as many other hardware features, from the Linux user-space.
The pin has to be exported first, which guarantees that it is not being used by other kernel drivers nor allow other drivers to use it. It also has to be configured as input or output.
From the Linux terminal, export the pins 15 and 50:
echo 15 > /sys/class/gpio/export
echo 50 > /sys/class/gpio/export
Configure the pins as input and output, respectively:
echo "in" > /sys/class/gpio/gpio15/direction
echo "out" > /sys/class/gpio/gpio50/direction
Read the switch value as you toggle it:
cat /sys/class/gpio/gpio15/value
Toggle the LED GPIO:
echo 1 > /sys/class/gpio/gpio50/value
echo 0 > /sys/class/gpio/gpio50/value
There is a debug interface provided by the kernel debugfs for GPIO, which holds information about GPIO pins already reserved for drivers, as well as pin configuration and state. See the example below for the Colibri iMX6, and try it yourself:
root@colibri-imx6:~# cat /sys/kernel/debug/gpio
GPIOs 0-31, platform/209c000.gpio, 209c000.gpio:
gpio-15 (sysfs ) in hi
GPIOs 32-63, platform/20a0000.gpio, 20a0000.gpio:
gpio-37 (cd ) in lo
gpio-50 (sysfs ) out lo
gpio-54 (Wake-Up ) in lo
GPIOs 64-95, platform/20a4000.gpio, 20a4000.gpio:
gpio-90 (enable ) out lo
gpio-95 (usb_host_vbus ) out lo
GPIOs 96-127, platform/20a8000.gpio, 20a8000.gpio:
gpio-108 (scl ) in hi
gpio-109 (sda ) in hi
GPIOs 128-159, platform/20ac000.gpio, 20ac000.gpio:
gpio-130 (spi_imx ) out lo
GPIOs 160-191, platform/20b0000.gpio, 20b0000.gpio:
GPIOs 192-223, platform/20b4000.gpio, 20b4000.gpio:
gpio-204 (id ) in lo
See that the pins 15 and 50, configured as input and output in the previous steps, are the only ones taken by sysfs and are correctly configured as in and out respectively.
Export, unexport, configure and toggle the GPIO pins as you read the debugfs information to see the changes.
Note: If you want additional pin configuration debug, explore the /sys/kernel/debug/pinctrl/ directory.
Write a small C application that toggles the LED GPIO. A small source-code is given below for reference and you may copy-paste it to your previously configured Eclipse environment.
Warning: The source-codes provided in this guide are distributed under the 3-clause BSD license terms. See below:
License
Copyright (c) 2017, Toradex
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
* Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
* Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
* Neither the name of the Toradex nor the
names of its contributors may be used to endorse or promote products
derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL Toradex BE LIABLE FOR ANY
DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES
(INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND
ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS
SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Source code 1
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
int main(int argc, char *argv[]){
int fd;
// export GPIO
fd = open("/sys/class/gpio/export", O_WRONLY);
write(fd, "50", 2);
close(fd);
// Configure as output
fd = open("/sys/class/gpio/gpio50/direction", O_WRONLY);
write(fd, "out", 3);
close(fd);
// Blink GPIO once
fd = open("/sys/class/gpio/gpio50/value", O_WRONLY | O_SYNC);
write(fd, "0", 1);
usleep(1000000);
write(fd, "1", 1);
close(fd);
return EXIT_SUCCESS;
}
Write a small C application that reads the switch GPIO. A small source-code is given below for reference and you may copy-paste it to your previously configured Eclipse environment.
Source code 2
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
int main(int argc, char *argv[]){
int fd;
char value;
// export GPIO
fd = open("/sys/class/gpio/export", O_WRONLY);
write(fd, "15", 2);
close(fd);
// configure as input
fd = open("/sys/class/gpio/gpio15/direction", O_WRONLY);
write(fd, "in", 2);
close(fd);
// read GPIO once
fd = open("/sys/class/gpio/gpio15/value", O_RDONLY);
read(fd, &value, 1); // read GPIO value
printf("GPIO value: %c\n", value); // print GPIO value
close(fd); //close value file
return EXIT_SUCCESS;
}
The GPIO sysfs interface enables the use of interrupts from user space, as long as it is supported by the underlying hardware. Read the sysfs GPIO documentation, have a look at the poll system call and try to implement an application that handles the interrupt. Have a look at the source code below for reference:
Source code 3
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <poll.h>
int main(int argc, char *argv[]){
int fd;
char value;
struct pollfd poll_gpio;
poll_gpio.events = POLLPRI;
// export GPIO
fd = open("/sys/class/gpio/export", O_WRONLY);
write(fd, "15", 2);
close(fd);
// configure as input
fd = open("/sys/class/gpio/gpio15/direction", O_WRONLY);
write(fd, "in", 2);
close(fd);
// configure interrupt
fd = open("/sys/class/gpio/gpio15/edge", O_WRONLY);
write(fd, "rising", 6); // configure as rising edge
close(fd);
// open value file
fd = open("/sys/class/gpio/gpio15/value", O_RDONLY);
poll_gpio.fd = fd;
poll(&poll_gpio, 1, -1); // discard first IRQ
read(fd, &value, 1);
// wait for interrupt
while(1){
poll(&poll_gpio, 1, -1);
if((poll_gpio.revents & POLLPRI) == POLLPRI){
lseek(fd, 0, SEEK_SET);
read(fd, &value, 1);
printf("Interrupt GPIO val: %c\n", value);
break;
}
}
close(fd); //close value file
return EXIT_SUCCESS;
}
To prevent the main loop from blocking, run the GPIO IRQ handling in a separate thread. Try to implement it.
Improve the code from the previous steps to handle errors and add other functionality you want. The code below implements a frequency meter by measuring the elapsed time between GPIO interruptions:
Source code 4
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <poll.h>
#include <time.h>
#include <string.h>
#include <errno.h>
// high priority or an error occured in SW
#define POLL_GPIO POLLPRI | POLLERR
#define TIMEOUT 10
#define SAMPLES 10
#define EXPORT_PATH "/sys/class/gpio/export"
#define SW_VAL_PATH "/sys/class/gpio/gpio15/value"
#define SW_INT_PATH "/sys/class/gpio/gpio15/edge"
#define SW_DIR_PATH "/sys/class/gpio/gpio15/direction"
int configure_pins();
const char *sw = "15"; // Linux GPIO representation
void close_fd(int);
int configure_pins();
int main(int argc, char *argv[]){
int fd, fd_edge, fd_export, count, poll_ret;
double period, cpu_time_used;
char value;
struct pollfd poll_gpio;
time_t t0, t1;
configure_pins();
while(fd = open(SW_VAL_PATH, O_RDONLY) <= 0);
printf("Opened SW value sucessfully\n");
// file descriptor from SW is being polled
poll_gpio.fd = fd;
// poll events in GPIO
poll_gpio.events = POLL_GPIO;
read(fd, &value, 1);
while(1){
t0 = time(0);
for(count = 0; count < SAMPLES; count++){
lseek(fd, 0, SEEK_SET);
read(fd, &value, 1); // read GPIO value
poll_ret = poll(&poll_gpio, 1, TIMEOUT*1000);
if(!poll_ret){
printf("Timeout\n");
return 0;
}
else{
if(poll_ret == -1){
perror("poll");
return EXIT_FAILURE;
}
if(poll_gpio.revents & POLLPRI){
lseek(fd, 0, SEEK_SET);
read(fd, &value, 1); // read GPIO value
printf("GPIO changed state!\n");
}
}
}
t1 = time(0);
period = difftime(t1, t0) * 1000;
period /= SAMPLES; // divide by n samples
printf("Period (ms): %f \n", period);
}
close(fd); //close value file
return EXIT_SUCCESS;
}
void close_fd(int fd){
// close file from file descriptor
if(close(fd) < 0){
perror("Warning: Unable to close file correctly");
}
}
int configure_pins(){
int fd_export, fd_edge, fd_input;
/*******************EXPORT*******************/
// open export file
if((fd_export = open(EXPORT_PATH, O_WRONLY)) <= 0){
perror("Unable to open export file\n");
return EXIT_FAILURE;
}else printf("Opened export file successfully\n");
// export SW GPIO
if(write(fd_export, sw, strlen(sw)) < 0){
if(errno != EBUSY){ // does not end if pin is already exported
perror("Unable to export SW GPIO\n");
close_fd(fd_export);
return EXIT_FAILURE;
}
perror("Warning: Unable to export SW GPIO\n");
} else printf("Exported SW successfully\n");
// close export file
close_fd(fd_export);
/******************DIRECTION******************/
// open direction file
if(fd_input = open(SW_DIR_PATH, O_WRONLY) <=0){
perror("Unable to open direction file for PIN 58\n");
return EXIT_FAILURE;
} else printf("Opened direction file successfully\n");
if(write(fd_input, "in", 2) < 0){ // configure as input
if(errno != EBUSY){
perror("Unable to change direction from SW\n");
close_fd(fd_input);
return EXIT_FAILURE;
}
perror("Warning: unable to change direction from SW\n");
}else printf("Changed direction from SW successfully\n");
close_fd(fd_input); // close direction file
/********************EDGE*********************/
while(fd_edge = open(SW_INT_PATH, O_RDWR) <=0);
printf("Opened edge file successfully\n");
while(write(fd_edge, "rising", 6) < 0);
printf("Changed edge from SW successfully\n");
close_fd(fd_edge);
return EXIT_SUCCESS;
}
This lesson only covers the basics of GPIO usage on Linux. Since there are other important topics that were not discussed, this FAQ section is meant as an information complement.
What is the sysfs interface
Quoting the Linux kernel documentation:
sysfs is a ram-based filesystem initially based on ramfs. It provides
a means to export kernel data structures, their attributes, and the
linkages between them to userspace.
See the kernel documentation for additional information:
sysfs
Should I always use the sysfs interface when I need to use a GPIO
Often there are kernel modules for dedicated purposes, which are preferred to implementing on your own. Examples of such are the control of LEDs, display backlight and power management.
In addition, there are hardware interfaces that may best suit your purposes, such as the PWM interface and other peripherals.
Browse this FAQ for reference regarding these alternatives.
Can I control backlight brightness using GPIO
All Toradex modules come configured to control a display backlight. For such purpose, one of the hardware PWM interfaces and a GPIO, as well as the Linux kernel backlight API, are employed.
The PWM interface is responsible for controlling the display brightness, and the GPIO for toggling it on/off.
For more details please consult the correspondent section of the GPIO article:
[Backlight (Linux)]http://developer.toradex.com/knowledge-base/backlight-(linux "Backlight (Linux)")
Is it possible to use a GPIO to shutdown the system
To use a GPIO as a power management input, you have to alter the device-tree and create a udev rule.
For more details please consult the correspondent section of the GPIO article:
Power Management Keys
Additionally, a GPIO can be used as an interrupt source to wake-up the system from a low-power state. The SODIMM 45 is defined as the wake-up pin by default.
For more details please consult the Suspend/Resume article:
Suspend/Resume
Can I bypass sysfs to have direct access to GPIO
If there isn't a kernel driver that suits your needs, you can access GPIO from kernel space rather than user space, and use the gpio.h kernel library.
There are other ways to access GPIO registers directly either from user space (using mmap) or kernel space (using ioremap). Those are problematic since they bypass the kernel handling of the GPIO controllers and might lead to unexpected behavior.
What happens when a GPIO pin is unexported
The behavior is not well defined for every module, depending on the provided BSP. If this knowledge is really required, you might verify the kernel GPIO/pinctrl subsystem.